치바 공업 대학 미래 로봇 기술 연구 센터(fuRo)와 Leading Edge Design(L.E.D.)가 최신의 다족 이동 로봇 "Halluc II"를 공개했다.
이 로봇은 재미난 것이 상황에 따라서 8개의 다리로 걷거나 그 다리에 붙은 바퀴로 달리거나 선택할 수 있는 재미난 로봇이다.
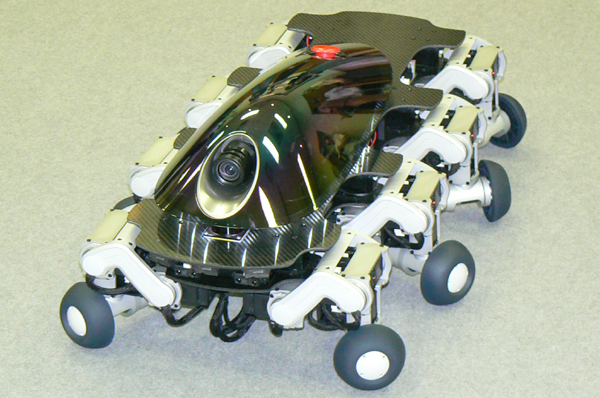
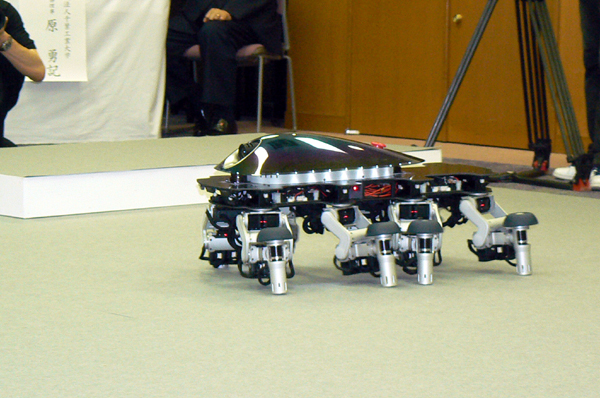
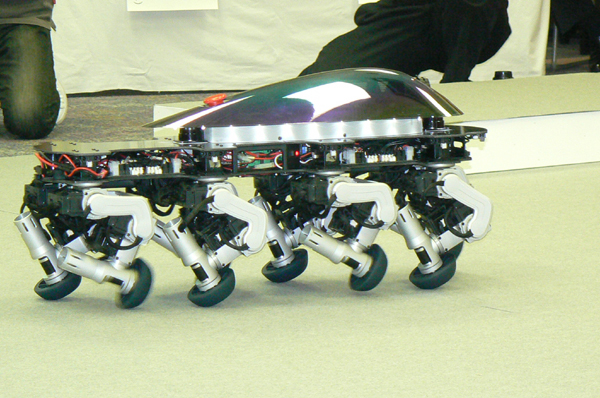
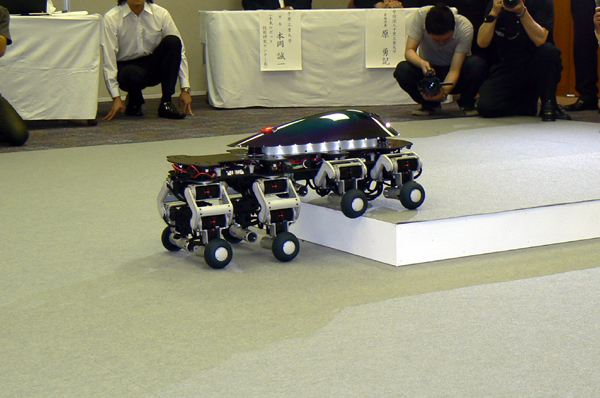
사진 출처 : ITmedia
http://plusd.itmedia.co.jp/lifestyle/articles/0707/26/news007.html
이 로봇은 재미난 것이 상황에 따라서 8개의 다리로 걷거나 그 다리에 붙은 바퀴로 달리거나 선택할 수 있는 재미난 로봇이다.
| 길이 | 805mm |
|---|---|
| 무게 | 20kg |
| 자유도 | 40(관절:32、바퀴:8) |
| 센서 | 관절 각도 센서 : 48 휠 제어용 엔코더 : 8 3축 경사 센서 : 1 거리 센서 : 13 레이저 측역(測域) 센서 : 2 |
| 기타 | 무선 LAN 지원 광역 무선 카메라 탑재 넘어 갈 수 있는 높이 125 mm 최대 등판 각도 40도 |
사진 출처 : ITmedia
http://plusd.itmedia.co.jp/lifestyle/articles/0707/26/news007.html

